
“Output” is one of the most fundamental specifications in motor selection. The ability to calculate the appropriate output based on required torque and rotational speed, and to select the motor best suited for the application, is essential.
This article provides a detailed explanation of motor output, covering everything from the basics to practical calculation methods and selection criteria. It serves as a guide for engineers involved in B2B product development—such as medical, industrial, and optical equipment—where high precision is essential.
| Supervised by: C.I. TAKIRON Corporation Electronic Devices Sales Group This article has been supervised based on the advanced technical expertise and insights we have cultivated since our founding in 1919 as a leading company in plastic processing. Our department continuously analyzes market trends and the latest technologies in ultra-compact, high-precision micro motors, focusing on providing high-value-added information to designers and developers. As a team of experts with in-depth knowledge of product characteristics, we support our customers’ problem-solving and technological innovation by delivering accurate and practical content. |
目次:
What Is Motor Output? Understanding Basic Concepts and Units
Motor output is a metric that indicates a motor’s ability to perform mechanical work. To ensure proper selection, let’s first understand the basic concepts.
Topics Covered in This Section
- Units of power and their conversions (W, kW, horsepower)
- The Difference Between Rated Output and Maximum Output
- The Relationship Between Power Consumption (Input) and Output
Understanding output correctly makes it easier to interpret specification sheets and compare products from different manufacturers.
Units of Output and Their Conversions (W, kW, HP)
Units of motor output include watts (W), kilowatts (kW), and horsepower (HP).
Horsepower includes mechanical horsepower (HP), which is used in the UK and US and has a slightly different definition. The main differences are as follows:
| Category | Symbol | Name | Main Regions of Use | Approximate Conversion Value |
| Mechanical Horsepower | HP | horsepower | UK, US, etc. | 1HP ≒ 0.746kW(746W) |
A proper understanding of unit conversions makes it easier to compare products from different manufacturers and align with international specifications.
The Difference Between Rated Output and Maximum Output
Rated power refers to the output that can be sustained during continuous operation within thermally acceptable limits under specified operating conditions (such as ambient temperature and cooling conditions). In contrast, maximum power is a peak value that can only be achieved for a short period and cannot be sustained due to thermal and electrical limitations. In product design, selection is based on rated power to ensure a safety margin. Caution is required, as continuous operation exceeding the rated power can cause overheating and malfunctions.
Setting output with a margin of safety helps maintain reliability and service life while reducing maintenance frequency.
Relationship Between Power Consumption (Input) and Output
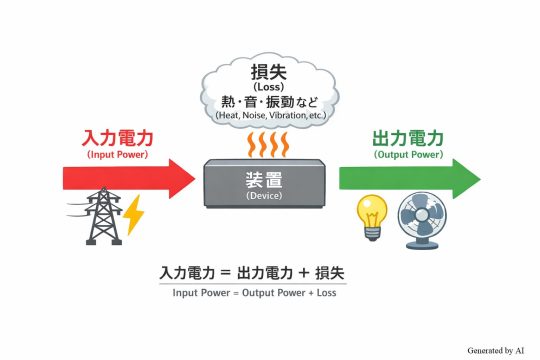
Power consumption (input) is the total amount of power supplied by the power source, while output is the power actually converted into mechanical work. The ratio between the two is efficiency; motors with higher efficiency can produce greater output with lower power consumption.
| Item | Description |
| Power Consumption (Input) | The total amount of power supplied by the power source |
| Output | Power converted into mechanical work |
| Efficiency | Output ÷ Power Consumption × 100 (%) |
Selecting high-efficiency motors is essential for energy-saving and battery-powered devices. C.I. Takiron’s coreless motors feature a design without an iron core, resulting in low iron losses and high efficiency.
How to Calculate Motor Output (Practical Steps Using Torque and RPM)
Motor output can be calculated as the product of torque and rotational speed, allowing you to work backward to determine the required output during the design phase. Understanding this formula enables you to select the optimal motor for specific load conditions.
Contents of this section
- Basic Formula for Output Calculation and Derivation Process
- Practical Example: Determining Required Output from Load Torque
- Practical Calculations Considering Efficiency and Losses
Below, we provide a step-by-step explanation of the calculation procedure that can be applied to actual design work.
Basic Formula for Output Calculation and Derivation Process
The basic formula for power (W) is expressed as “P = T × ω” (torque T × angular velocity ω). Since angular velocity is given by “ω = 2πN / 60” (where N is the rotational speed in rpm), the final formula derived is “P = T × 2πN / 60.” Using this formula, power can be calculated if the required torque and rotational speed are known.
Torque is measured in units of N·m (newton-meters) and mN·m (millinewton-meters). In small motors such as micromotors, torque is often in the mN·m range (1 N·m = 1000 mN·m), so care must be taken to convert units during calculations. Conversely, the required torque can also be calculated in reverse from the output and rotational speed. In the early stages of design, it is common practice to use this basic formula to obtain an approximate value and then incorporate a safety factor during detailed design.
Practical Example: Calculating Required Output from Load Torque
Let’s explain this using an actual design example. In this case, we are driving a small pump with a required torque of 300 mN·m and an operating speed of 4000 rpm.
[Calculation Procedure]
- Step 1: Substitute values into the basic formula P = T × 2πN / 60 (convert mN·m to N·m: 300 mN·m = 0.3 N·m)
- Step 2: 0.3 × 2π × 4000 / 60 ≒ 125.7 W
- Step 3: Apply a safety factor (in this case, calculate using a factor of 1.15 to 1.4)
- Step 4: Select a 150–180 W class motor
In practice, selection must account for a safety factor that takes into consideration motor efficiency and load fluctuations. By narrowing down the appropriate power range through calculations in this manner, you can prevent cost increases due to overspecification and performance issues caused by underspecification.
Practical Calculations Considering Efficiency and Losses
For many general-purpose motors, an efficiency of around 70% to 90% is typical. In the case of very small micro-motors, efficiency may fall to the 50% to 60% range, so mechanical losses must be taken into account.
If the required output is 100 W and the efficiency is 80%, the input is 100 W / 0.8 = 125 W. Selecting a high-efficiency motor reduces power consumption and minimizes heat generation. Furthermore, practical calculations that take efficiency into account enable a more realistic motor selection.
Key Points for Selecting the Right Motor Based on Actual Needs

Motor selection requires a multifaceted perspective that goes beyond simple power calculations, taking into account application, environment, and load characteristics. Since performance requirements vary by industry, selection based on actual needs is the key to success.
Contents of this section
- Selection Criteria by Application (Medical, Industrial, and Optical Equipment)
- Optimal Solutions Using C.I. Takiron’s Micro Motors
Below, we explain practical selection criteria along with the specific requirements for each industry.
Selection Criteria by Application (Medical, Industrial, and Optical Equipment)
In medical devices, low vibration, quiet operation, and high-precision control are prioritized, making cogging-free coreless motors advantageous. For devices that come into direct contact with patients, such as endoscopes and pumps, smooth operation is essential.
In industrial equipment, durability and high torque are required, necessitating motors that deliver sufficient output even in compact sizes. For power tools and handheld devices, the challenge lies in balancing portability with performance. In optical equipment, fast response and positioning accuracy are critical, making low-inertia, high-efficiency coreless motors ideal. For camera autofocus and microscope lens drives, precise control determines image quality, making the selection of high-precision motors indispensable.
It is necessary to understand the specific requirements of each industry and select the optimal motor type.
The Optimal Solution with C.I. Takiron’s Micro Motors
C.I. Takiron’s coreless motors feature a structure without an iron core, achieving high efficiency and low vibration while remaining compact and lightweight. They are suitable for a wide range of applications, including precision control in medical devices, space-saving designs in industrial equipment, and high-speed response in optical equipment.
[Features of C.I. Takiron’s Coreless Motors]
- Smooth rotation thanks to cogging-free operation
- High-speed response and precise positioning
- Low-voltage startup and high-efficiency design
- Compact, lightweight, and space-saving
- Long service life and high reliability
We offer flexible customization and small-lot production, and provide technical support from the design stage.
Summary

Motor output can be calculated based on torque and rotational speed, and serves as a fundamental selection criterion in product design. This article explains the basic concepts and units of output, practical calculation methods, and selection criteria based on actual needs.
By accurately calculating output and selecting the appropriate motor type for the application, you can improve equipment performance and ensure reliability. Medical devices require low vibration and high-precision control; industrial equipment demands durability and high torque; and optical equipment requires high-speed response.
C.I. Takiron provides high-performance micro motors that meet these diverse requirements and supports your product development with technical assistance from the design stage.
Product Information & Inquiries
For more details on C.I. Takiron’s micro motor products, please visit the website below.
- Product Site: https://cik-ele.com/en/
- Coreless Motors: https://cik-ele.com/en/products/list/coreless_motor/
- Brushless Motors: https://cik-ele.com/en/products/list/brushless_motor/
- Geared Motors: https://cik-ele.com/en/products/list/gearhead/
- Encoders: https://cik-ele.com/en/products/list/encoder/
If you are having trouble selecting a small motor for your product development, please feel free to contact us via the inquiry form. Our technical staff will discuss your application and requirements with you and propose the optimal solution.
- Inquiries: https://cik-ele.com/en/contact/





