

モータの回転速度を正確に把握し制御する技術は、機器の性能や安定動作(要求仕様)に直結し重要です。
「回転速度の計算式を知りたい」
「電圧やトルクが回転速度にどう影響するのか理解したい」
「精密な速度制御を実現する方法を検討したい」
といった技術的な課題に対して、本記事では、DCモータの回転速度の基本計算式から、回転速度に影響を与える要因、T-N特性(トルク-回転数特性)の読み方、さらにPWM制御やフィードバック制御による実践的な速度制御方法まで、技術的根拠に基づいて解説します。医療機器や光学機器など、回転ムラ低減や安定速度が重視される分野の技術者の皆様に役立つ情報を提供します。
| 監修:タキロンシーアイ株式会社電子部品営業グループ 1919年の創業以来、プラスチック加工のリーディングカンパニーとして培った高度な技術力と知見に基づき、本記事を監修しています。当部では、超小型・高精度なマイクロモータの市場動向や最新技術を常に分析し、設計者や開発者の皆様へ付加価値の高い情報を提供することに注力しています。製品の特性を熟知した専門チームとして、正確かつ実用的なコンテンツの発信を通じて、お客様の課題解決と技術革新をサポートいたします。 |
DCモータの回転速度の計算方法

直流(DC)モータの回転速度は、等価回路から導かれる計算式で求められます。印加電圧や電機子電流、モータ固有の定数を用いた基本式を理解すれば、運転条件ごとの回転速度を予測できます。
このセクションで解説する内容
- 等価回路から回転速度を求める方法
- T-N特性で回転速度を読み取る方法
- 回転速度と回転数の違い
以下では、計算式の導出過程からT-N特性の読み方、さらに用語の整理まで順を追って解説します。
等価回路から回転速度を求める
DCモータの回転速度は、等価回路の電圧方程式から導出できます。ブラシ付きDCモータに電源を接続した等価回路では、電源電圧Ea[V]、電機子抵抗R[Ω]、電機子電流Ia[A]、モータの発電電圧(逆起電力)Ec[V]の間に以下の関係が成り立ちます。
| 記号 | 名称 | 単位 |
| Ea | 電源電圧 | V |
| R | 電機子抵抗 | Ω |
| Ia | 電機子電流 | A |
| Ec | 逆起電力(= Ke × N) | V |
| Ke | 発電定数(逆起電力定数) | V/rpm |
| N | 回転速度 | rpm |
等価回路の電圧方程式は「Ea = Ia × R + Ec」で表されます。逆起電力Ecは回転速度Nに比例し「Ec = Ke × N」となるため、Nについて整理すると以下の計算式が得られます。
N =(Ea − R × Ia)/ Ke
この式から、印加電圧Eaが高いほど回転速度Nは上昇し、電機子電流Iaが増加すると電機子抵抗による電圧降下(R × Ia)が大きくなり回転速度が低下する関係が読み取れます。なお、SI単位(Ke: V/(rad/s)、Kt: N·m/A)で表すと、逆起電力定数Keとトルク定数Ktは物理的に等価です。
この性質は、モータが電気エネルギーと機械エネルギーを双方向に変換する装置であるためです。コアレスモータでも同様に、SI単位で表した場合はKe = Ktの関係が成り立ち、回転速度の計算に同じ式を適用できます。
T-N特性で回転速度を読み取る
T-N特性(トルク-回転数特性)は、DCモータの負荷トルクと回転速度の関係をグラフで示した性能線図です。横軸にトルクT[mNm]、縦軸に回転速度N[rpm]をとり、両者の関係は右下がりの直線として扱われます。
前述の等価回路から導かれる回転速度の式「N =(Ea − R × Ia)/ Ke」と、トルクの式「T = Kt × Ia」(Kt:トルク定数[mNm/A])を組み合わせると、以下のT-N特性の式が得られます。
N = Ea / Ke −(R /(Kt × Ke))× T
この式が示すとおり、T-N特性は代表的な近似として右下がりの直線として扱われます。負荷トルクがゼロのときの回転速度は無負荷回転速度(N0)とされ、負荷トルクの増加に伴って回転速度が低下していく特性です。回転速度がゼロになる点のトルクは停動トルク(T0)と呼び、これを超える負荷では回転を維持できず停止します。
【T-N特性の読み方】
- 無負荷時の回転速度(N0):無負荷条件での回転速度(一般に最大に近い)
- 停動トルク():回転速度がゼロ(停止)となる時点のトルク
- :実際の負荷トルクに対応する回転速度の交点
T-N特性はモータの仕様書やカタログに記載される基本的な性能情報です。使用条件での回転速度を事前に予測し、適切なモータ選定を進める際に活用してください。
回転速度と回転数の違いを理解する
回転速度と回転数は、モータの仕様書やカタログで同じ意味で使われる用語です。JIS B 6010では、回転数を「単位時間当たりの回転数」と定義しており、回転速度と同じ物理量を指します。単位はrpm(revolutions per minute)またはmin⁻¹で表記され、1分間あたりの回転の回数を示します。
モータメーカー各社の仕様書やカタログでは、「回転数」と「回転速度」の表記が混在しています。例えば、あるメーカーの技術解説では「モータのシャフトが1分間に回る回数」を回転数と定義し、単位をr/minまたはrpmとしています。
どちらの表記であっても単位がrpmまたはmin⁻¹であれば同じ物理量を指すため、複数メーカーの仕様書を比較する際は単位を確認すれば混乱を避けられます。
直流モータの回転速度に影響する要因

直流モータの回転速度は、運転中にさまざまな要因で変動します。計算式「N =(Ea − R × Ia)/ Ke」が示すとおり、印加電圧・電機子電流(=負荷トルクに応じて変化)・モータ定数が回転速度に影響します。
このセクションで解説する内容
- 電圧変化が回転速度に与える影響
- 負荷トルクによる回転速度の変動
- 回転速度とトルクの反比例関係
これらの変動要因を正しく理解すれば、実際の運転時に回転速度が想定と異なる原因を特定し、適切なモータ選定や駆動条件の設定に生かせます。
電圧変化が回転速度に影響
直流モータでは、印加電圧を高くすると回転速度が上昇します。計算式「N =(Ea − R × Ia)/ Ke」において、電源電圧Eaが大きくなると、電圧を上げた直後は電機子電流Iaが増加してモータが加速します。加速に伴って逆起電力が上昇し、電機子電流が低下して新たな平衡状態に達するため、最終的に回転速度が高まる仕組みです。
T-N特性上では、電源電圧を上げるとグラフ全体が上方へ平行移動し、無負荷回転速度と停動トルクの両方が増大します。反対に電圧を下げるとグラフは下方へ移動し、回転速度とトルクがともに低下します。この平行移動の性質は、電圧によってT-Nカーブ全体を調整できる直流モータの大きな利点です。
ただし、定格電圧を超える電圧の印加はモータの発熱や絶縁劣化を招き、寿命低下の原因となります。駆動条件の設定時には、モータの定格仕様を必ず確認してください。
負荷トルクによる回転速度の変動
負荷トルクが増加すると、直流モータの回転速度は低下します。モータは負荷に応じたトルクを出力するために電機子電流Iaを増やす必要があり、電機子抵抗による電圧降下(R × Ia)が大きくなります。その結果、逆起電力Ecが低下し、回転速度が下がる仕組みです。
負荷状態ごとの回転速度と電機子電流の変化を以下に整理します。
| 負荷状態 | 電機子電流 | 回転速度 |
| 無負荷 | 最小 | 最大(無負荷回転速度) |
| 定格負荷 | 定格値 | 定格回転速度 |
| 過負荷 | 過大 | 大幅に低下(停止のおそれあり) |
代表的な近似として、負荷トルクの増加に伴い回転速度が低下する関係が読み取れます。
実際は、無負荷状態でもモータの摩擦等があり、完全に負荷がゼロになることはないため、最大回転数でも電流はゼロになりません。過負荷状態ではモータが停止(ロック)するおそれがあり、巻線の過熱による焼損につながります。用途に適した定格トルクのモータを選定し、過負荷保護の対策も合わせて検討してください。
回転速度とトルクの反比例関係
直流モータの回転速度とトルクは、一方が増加すると他方が減少するトレードオフ(負の相関)の関係にあります。高速回転時は出力トルクが小さくなり、低速回転時には大きなトルクを発生します。
モータの機械的出力P[W]は、回転速度とトルクの積で求めることができ、角速度ω[rad/s]を用いた計算式は以下のとおりです。
P = T × ω [ = T ×(2πN / 60)]
同じ出力であれば、回転速度を下げるとトルクが増加し、回転速度を上げるとトルクが減少します。例えば、出力0.5Wのモータで角速度を半分にすれば、出力トルクは理論上2倍になります。この特性を利用し、モータの高速回転をギアヘッドで減速すれば、電気的な制御を変更せずに低速・高トルクの出力特性を得ることが可能です。
用途によって、高速・低トルクが求められる場合と低速・高トルクが求められる場合があります。回転速度とトルクのバランスが用途の要件に合わない場合は、ギアヘッドを組み合わせたギアードモータの採用も有効な選択肢です。
モータの回転速度を制御する方法
直流モータの回転速度を制御する方法には、電気的な手法と機械的な手法があります。用途が求める精度・応答速度・コスト・搭載スペースに応じて、最適な制御方式を選択する必要があります。
このセクションで解説する内容
- PWM制御で電圧を調整する方法
- フィードバック制御で速度を安定させる方法
- ギアヘッドで回転速度を変換する方法
以下では、DCモータの速度制御で広く採用されている3つの方法を、原理と特徴とともに解説します。
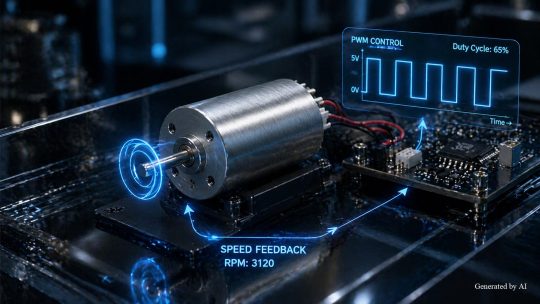
PWM制御で電圧を調整する
PWM(Pulse Width Modulation:パルス幅変調)制御は、電圧のオン・オフを高速で切り替え、オン時間の割合(デューティ比)を変えてモータへの平均電圧(等価的な印加電圧)を調整する方式です。スイッチング周波数が十分に高ければ、モータのインダクタンス成分が電流を平滑化するため、デューティ比に応じた平均電圧で安定した回転が得られます。
デューティ比と回転速度の関係を以下にまとめます。
| デューティ比 | 平均電圧 (電源電圧12Vの場合) | 回転速度への影響 (条件による |
| 25% | 約3V | 低下方向 |
| 50% | 約6V | 中間付近 |
| 75% | 約9V | 上昇方向 |
| 100% | 12V | 最大方向 |
PWM制御はスイッチング素子のオン・オフで電圧を調整するため、抵抗による電圧降下方式と比較して電力損失が少なく効率に優れています。PWMはブラシ付きDCモータやブラシレスDCモータの駆動で一般的に用いられ、設計条件によっては比較的シンプルな構成で実装できます。
フィードバック制御で速度を安定させる
フィードバック制御は、エンコーダやタコジェネレータなどのセンサで実際の回転速度を検出し、目標速度との偏差に応じて駆動電圧を自動調整する方式です。PWM制御単体(オープンループ制御)では負荷変動時に回転速度が変化しますが、フィードバック制御を組み合わせれば、負荷が変動しても回転速度の変動を抑え、目標速度に追従させられます。
フィードバック制御の基本構成は
『目標速度の設定』
→『制御器で偏差を演算』
→『駆動回路でモータへの電圧を調整』
→『センサで実速度を検出』
→『制御器へ帰還』
のループです。マイコンでPID制御(比例・積分・微分)を実装する例も多く、3要素の組み合わせにより速度追従性や外乱抑圧を調整できます。
【PID制御の3要素 】
- P(比例)制御:偏差の大きさに比例した補正
- I(積分)制御:偏差の蓄積を解消する補正
- D(微分)制御:偏差の変化速度に応じた補正
医療機器や光学機器など高い速度安定性が求められる用途では、コギングが小さいモータ特性や、エンコーダの分解能・検出精度が、速度フィードバックの性能に影響します。
ギアヘッドで回転速度を変換する
ギアヘッド(減速機)は、モータの高速回転をギアのかみ合わせによって低速・高トルクに変換する装置です。減速比と伝達効率、負荷条件を踏まえて、電気的な制御を大きく変えずに目標レンジの回転速度・トルクに調整できます。
例えば、減速比100:1のギアヘッドをモータに組み合わせた場合、モータの回転速度が10,000 rpmであれば出力軸の回転速度は100 rpmとなり、トルクは理論上100倍に増大する仕組みです(実際にはギアの伝達効率に応じたロスが生じます)。
100:1 = 10,000rpm:100rpm
電気的なPWM制御やフィードバック制御と併用すれば、より幅広い速度・トルク範囲をカバーできます。
ギアヘッドとモータを一体化した製品がギアードモータです。タキロンシーアイでは、コアレスモータやブラシレスモータに加え、ギアードモータも取り扱っています。モータ単体の選定からギアードモータまで、用途に応じた最適な構成を提案できる体制を整えています。
まとめ

直流モータの回転速度は、等価回路の式「N =(Ea − R × Ia)/ Ke」から求められ、印加電圧・電機子抵抗・逆起電力定数に加え、負荷トルクに応じて変化する電機子電流によって変動します。T-N特性では、電圧変化によりグラフが近似的に平行移動し、負荷トルクが増すほど回転速度が低下する相関関係が示される仕組みです。
回転速度の制御には、PWM制御による電圧調整、フィードバック制御による速度安定化、ギアヘッドによる機械的な減速など複数の方法があり、求められる精度やコストに応じて選択します。精密機器の開発では、コギングが小さい滑らかな回転特性や応答性に優れるモータの選定が、要求性能の達成に影響します。
製品情報・お問い合わせ
タキロンシーアイのマイクロモータ製品については、以下のウェブサイトで詳細をご覧いただけます。
お客様の製品開発における小型モータ選定でお困りの際は、お問い合わせフォームからお気軽にご相談ください。技術担当者が用途や要件をヒアリングし、最適なソリューションをご提案いたします。
- お問い合わせ:https://cik-ele.com/contact/





