
モータを使用する製品開発において、電圧とモータ性能の関係を正しく理解することは、適切なモータ選定と効率的な設計の基盤となります。
印加電圧を変化させるとモータの回転数やトルクがどう変わるのか、また電流との関係はどうなっているのか。これらの基本特性を把握しておかなければ、製品の性能要件を満たすモータ仕様を決定できません。
特に近年では、IoT機器や携帯型医療機器など電池駆動製品の需要増加に伴い、低電圧でも安定して動作するモータへの関心が高まっています。
本記事では、モータと電圧の関係性を技術的に解説した上で、最低1.0Vから起動可能なコアレスモータの特性についてご紹介します。
| 監修:タキロンシーアイ株式会社電子部品営業グループ 1919年の創業以来、プラスチック加工のリーディングカンパニーとして培った高度な技術力と知見に基づき、本記事を監修しています。当部では、超小型・高精度なマイクロモータの市場動向や最新技術を常に分析し、設計者や開発者の皆様へ付加価値の高い情報を提供することに注力しています。製品の特性を熟知した専門チームとして、正確かつ実用的なコンテンツの発信を通じて、お客様の課題解決と技術革新をサポートいたします。 |
モータの電圧と回転数・トルク・電流の関係
モータ性能を決定する主要パラメータである電圧・回転数・トルク・電流は、相互に密接な関係を持っています。
このセクションで解説する内容
- 電圧を上げると回転数が上がる理由
- トルクと電流の比例関係
- 逆起電力が及ぼす影響
DCモータやブラシレスモータでは、印加電圧を上げると回転数が上昇し、トルクは電流に比例して発生します。また、モータが回転すると逆起電力が発生し、実際に巻線に流れる電流を減少させます。
これらの関係を理解することで、負荷条件に応じた適切な電圧設定や制御方法の選択が可能です。
電圧を上げると回転数が上がる理由
DCモータでは、印加電圧を高くすると回転数が上昇します。回転数の上昇に伴い逆起電力も増加し、最終的に「印加電圧=逆起電力+内部電圧降下」のバランスが取れる点で動作が安定します。
一方、発生トルクは巻線電流に比例します。負荷トルクが大きくなると必要な電流が増加し、それに応じて発生トルクも増大します。モータは、負荷トルクと発生トルクが一致する回転数で安定して運転します。
電圧方程式:「V = KeN + IR」
| 記号 | 意味 | 説明 |
| V | 印加電圧 | モータに供給する電圧 |
| Ke | 逆起電力定数 | 回転数あたりの発生電圧 |
| N | 回転速度 | モータの回転速度 |
| I | 電流 | 巻線に流れる電流 |
| R | 巻線抵抗 | コイルの電気抵抗 |
一般的に、無負荷付近や同一条件下では、印加電圧を高くすると回転数が上昇し、それに伴い逆起電力も増加します。結果として、回転数はおおむね電圧に比例して上がります。
この比例関係を活用することで、電圧制御による速度調整が可能です。
コアレスモータやブラシレスモータも同様の原理で動作しており、電圧と回転数の関係は設計の基本となっています。
製品開発では、必要な回転数を得るために適切な電圧を選定してください。
トルクと電流の比例関係
モータのトルクは、巻線に流れる電流にトルク定数を乗じた値として表されます。この関係式は次の計算式で表され、トルクは電流に正比例します。
モータトルク:「T = Kt × I」
| 記号 | 意味 | 説明 |
| T | トルク(mN·m) | モータが軸を回す力の大きさ |
| Kt | トルク定数(mN·m/A) | 1Aで発生するトルク |
| I | 電流(A) | 巻線に流れる電流 |
負荷が増加してより大きなトルクが必要になると、モータの回転数は一時的に低下します。回転数の低下に伴い逆起電力が減少し、その結果として巻線に流れる電流が増加します。
電流の増加に比例して発生トルクも増大し、負荷トルクとつり合う点で新たな動作点が決まります。
例えば、トルク定数が 5.0 mN·m/A のモータに 0.2 A の電流が流れている場合、発生トルクは 1.0 mN·m と算出されます。
この比例関係(T = Kt I)を利用することで、電流を測定するだけで発生トルクを推定することが可能です。これは、制御回路設計や負荷状態の監視、過負荷保護設計において有効な指標となります。
逆起電力が及ぼす影響
モータが回転すると発電作用により逆起電力が発生し、印加電圧と逆向きに作用します。逆起電力は次の計算式で表され、回転数に比例して大きくなります。
起電力:「E = Ke × N」
| 記号 | 意味 |
| E | 逆起電力(V) |
| Ke | 逆起電力定数(V/krpm) |
| N | 回転数(rpm) |
回転数が高くなるほど逆起電力は増加し、印加電圧との差が小さくなるため、巻線に流れる電流は自然に制限されます。
無負荷状態では逆起電力が印加電圧とほぼ等しくなり、内部抵抗による電圧降下がごく小さくなるため、流れる電流は空転電流のみとなります。
この「逆起電力による自己制限作用」により、モータは負荷トルクと発生トルクがつり合う回転数で動作点が決まります。
一方、低電圧で動作させる場合は、得られる逆起電力も小さくなるため、特に起動時に十分な電流を確保できるかが重要な設計ポイントとなります。電源容量や内部抵抗の影響を考慮した設計が必要です。
モータの電圧特性と選定時の重要ポイント

モータを選定する際には、使用電圧範囲、定格電圧、起動電圧などの電圧特性を正確に把握する必要があります。
このセクションで解説する内容
- T-N特性と供給電圧の関係
- 定格電圧と使用電圧範囲
- 低電圧駆動における課題
モータのカタログには定格電圧、使用電圧範囲、最低起動電圧などが記載されています。
これらの数値が実際の製品性能にどう影響するかを把握しておかなければ、適切なモータ選定はできません。また、電池駆動機器では電圧降下を見越した設計が必須となります。
T-N特性と供給電圧の関係
モータの性能を表すT-N特性(トルク-回転数特性)グラフは、供給電圧によって大きく変化します。供給電圧を変えると、T-Nカーブ全体が平行移動し、無負荷回転数と起動トルクは、同一条件下であれば電圧におおむね比例します。
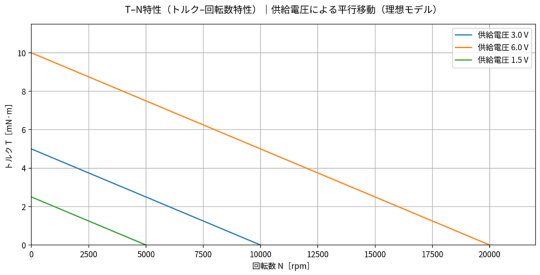
例えば、無負荷付近の条件では、定格3.0 Vのモータに6.0 Vを印加すると、無負荷回転数や起動トルクは理論的に、無負荷回転数は10,000 rpmから約20,000 rpm、起動トルクは5.0 mN·mから約10.0 mN·mへと、電圧におおむね比例して増加します。ただし、実際には磁気回路の特性や発熱の影響により、完全に2倍にならない場合もあります。
| 供給電圧(理論上参考値) | 無負荷回転数 | 起動トルク |
| 3.0V(定格) | 10,000 rpm | 5.0 mN·m |
| 6.0V | 20,000 rpm | 10.0 mN·m |
| 1.5V | 5,000 rpm | 2.5 mN·m |
この特性を活用することで、PWM制御により平均印加電圧(デューティ比)を調整し、モータの回転数を連続的に変化させられます。
製品設計では、要求されるトルクと回転数を満たす電圧範囲を明確にし、電源回路の設計が必要です。
定格電圧と使用電圧範囲
定格電圧はモータが性能を評価される基準となる電圧値です。使用電圧範囲は製品・メーカーの仕様(データシート)に従って設定し、電源変動も踏まえて設計します。
使用電圧範囲を超えた高電圧では過熱や寿命低下が発生し、低電圧では必要なトルクや回転数が得られません。
| 電圧条件(参考値) | モータへの影響 |
| 定格電圧超過(+10%超) | 過熱、ブラシ摩耗促進、寿命短縮 |
| 定格電圧範囲内(±10%) | 正常動作、設計寿命を確保 |
| 定格電圧以下(-10%未満) | トルク不足、回転数低下、性能低下 |
モータ選定時には、実際の使用環境での電源電圧変動を考慮する必要があります。
電池駆動機器では電圧降下により、使用時間の経過とともにモータ性能が低下します。
安定した動作を確保するには、電圧降下後も必要な性能を維持できるモータの選定が重要です。
低電圧駆動における課題
電池駆動機器では電池の電圧降下により、使用時間の経過とともにモータ性能が低下します。安定した動作を確保するには、低電圧でも起動可能なモータの選定と、電圧降下を考慮した回路設計が必要です。
【低電圧駆動で発生する主な課題】
- 起動電圧不足による動作不良
- トルク低下による負荷駆動の失敗
- 制御回路の誤動作や保護回路の作動
- 電池残量表示の精度低下
これらの課題に対応するためには、低電圧での起動特性に優れたモータを選定することが有効です。特にセキュリティ機器や医療機器など、確実な動作が求められる用途では、最低動作電圧が低いモータが必須となります。
次のセクションでは、1.0Vという低い電圧から起動可能なタキロンシーアイのコアレスモータについて解説します。
低電圧から駆動可能なタキロンシーアイのコアレスモータ

タキロンシーアイのコアレスモータは、最低1.0Vから起動可能な特性を持ち、電池駆動機器の省電力化と長寿命化に貢献します。
このセクションで解説する内容
- コアレスモータの低電圧起動特性
- 省電力・高効率設計のメリット
- 用途別の導入事例と製品選定
鉄芯を持たないコアレス構造により、コギングトルクがほぼゼロで滑らかな回転が得られるほか、小型でありながら高効率な動作を実現しています。
医療機器、セキュリティ機器、ホビー製品など、電池寿命が製品価値を左右する用途において、従来モータでは実現困難だった低電圧領域での安定動作が可能です。
コアレスモータの低電圧起動特性
鉄芯を使用しないコアレス構造により、起動時のコギングトルクや鉄損が発生せず、最低1.0Vから起動可能です。
この特性により、電池残量が少ない状態でも動作を継続でき、電池交換頻度の削減が可能です。
| 項目 | 当社想定の従来品 | タキロンシーアイ 直径4mmのコアレスモータ |
| 最低起動電圧 | 2.0V~3.0V | 1.0V |
| 起動時のコギング | あり | ほぼゼロ |
| 低電圧時の動作 | 不安定 | 安定 |
例えば、電池駆動の電子錠では、電池電圧の低下により、従来モータでは動作が不安定になる場合があります。一方で、タキロンシーアイのコアレスモータには、1.0Vから起動可能なモデルがあり、低電圧域でも安定した動作に寄与します。
この特性は、セキュリティ機器や医療機器など、確実な動作が求められる用途では、特に重要となるポイントです。
コアレス構造による低電圧起動性能は、製品の信頼性向上に直結します。
省電力・高効率設計のメリット
低電圧駆動と高効率動作の組み合わせにより、消費電流を大幅に削減可能です。
電池駆動の医療機器やセキュリティ機器では、長時間の連続稼働が求められるため、この省電力特性が製品の信頼性向上に直結します。
【省電力設計による主なメリット】
- 電池寿命の延長(交換頻度の削減)
- 電源の小型化による製品の軽量化
- 発熱の抑制(熱設計の簡素化)
- 連続稼働時間の向上
タキロンシーアイのコアレスモータは、鉄芯による鉄損がないため、同等の出力を得る際の消費電流を抑えられます。
例えば、携帯型医療機器では1回の充電での使用時間が延び、患者の利便性向上につながります。また、ホビー製品では小さな電池でも十分な動作時間を確保でき、製品の小型化と性能向上の両立が可能です。
用途別の導入事例と製品選定
タキロンシーアイでは、電子錠、携帯型医療機器、ホビー製品など、電池駆動が前提となる用途で採用実績があります。
用途に応じたカスタマイズ対応や、小ロットから量産までの柔軟な生産体制を整えており、開発段階からのご相談が可能です。
| 用途分野 | 要求特性 |
| セキュリティ機器 | 低電圧起動、長寿命 |
| 医療機器 | 高精度、省電力 |
| 光学機器 | 低振動、高応答性 |
| ホビー製品 | 小型、高トルク |
製品開発では、必要なトルク、回転数、電圧範囲を明確にした上で、最適なモータ仕様を選定する必要があります。
タキロンシーアイでは、お客様の製品要件をヒアリングし、豊富なラインナップから最適なモータをご提案します。
試作段階でのサンプル提供や、量産時の品質管理まで一貫してサポートしており、開発パートナーとして信頼いただけます。
まとめ
モータと電圧の関係を正しく理解することは、製品開発における適切なモータ選定の基盤です。
電圧・回転数・トルク・電流の相互関係を把握し、T-N特性や定格電圧の意味を理解することで、要求仕様を満たすモータ仕様を決定できるでしょう。
特に電池駆動機器では、低電圧での起動性能と消費電力が製品の稼働時間を左右するため、最低1.0Vから駆動可能なタキロンシーアイのコアレスモータは有力な選択肢となります。
コアレス構造による低電圧起動特性と高効率動作を活用し、電池寿命の延長と製品の信頼性向上を実現しましょう。
製品情報・お問い合わせ
タキロンシーアイのマイクロモータ製品については、以下のウェブサイトで詳細をご覧いただけます。
- 製品サイト:https://cik-ele.com/
- コアレスモータ:https://cik-ele.com/products/list/coreless_motor/
- ブラシレスモータ:https://cik-ele.com/products/list/brushless_motor/
- ギアードモータ:https://cik-ele.com/products/list/gearhead/
- エンコーダ:https://cik-ele.com/products/list/encoder/
お客様の製品開発における小型モータ選定でお困りの際は、お問い合わせフォームからお気軽にご相談ください。技術担当者が用途や要件をヒアリングし、最適なソリューションをご提案いたします。
- お問い合わせ:https://cik-ele.com/contact/
本記事で使用するDCモータの基本公式は、以下の学術的・技術的文献に基づいています:
- 電圧方程式「V = Eb + Ia Ra」
National Institute of Technology, “D.C. Motor” https://nit-edu.org/wp-content/uploads/2021/09/ch-29-Dc-motor.pdf
- トルク方程式「T = Kt × I」
MIT OpenCourseWare, “Magnetic electro-mechanical machines”





