
モータ選定において「出力」はもっとも基本となる仕様の一つです。必要なトルクや回転数から適切な出力を算出し、用途に最適なモータを選ぶスキルが求められます。
本記事では、モータ出力の基礎から実践的な計算方法、選定ポイントまでを詳しく解説します。医療機器・産業機器・光学機器など、高精度が求められるBtoB製品開発に携わるエンジニアの方々にとって、モータ選定の指針となる内容です。
| 監修:タキロンシーアイ株式会社電子部品営業グループ 1919年の創業以来、プラスチック加工のリーディングカンパニーとして培った高度な技術力と知見に基づき、本記事を監修しています。当部では、超小型・高精度なマイクロモータの市場動向や最新技術を常に分析し、設計者や開発者の皆様へ付加価値の高い情報を提供することに注力しています。製品の特性を熟知した専門チームとして、正確かつ実用的なコンテンツの発信を通じて、お客様の課題解決と技術革新をサポートいたします。 |
モータ出力とは?基本概念と単位の理解
モータ出力は、モータが機械的仕事をする能力を示す指標です。適切な選定のため、まず基本概念を理解しましょう。
このセクションで解説する内容
- 出力の単位とその変換(W、kW、馬力)
- 定格出力と最大出力の違い
- 消費電力(入力)と出力の関係
出力を正しく理解すれば、仕様表の読み解きや他社製品との比較がスムーズになります。
出力の単位とその変換(W、kW、馬力)
モータ出力の単位には、ワット(W)、キロワット(kW)、馬力(HP)などがあります。
馬力には、英米で使われる機械馬力(HP)があり、定義がわずかに異なります。主な違いは以下のとおりです。
| 区分 | 記号 | 名称 | 主な使用地域 | 換算値の目安 |
| 機械馬力 | HP | horsepower | 英米など | 1HP ≒ 0.746kW(746W) |
単位変換を正しく理解すれば、異なるメーカーの製品比較や海外仕様との整合が容易になります。
定格出力と最大出力の違い
定格出力とは、規定された使用条件(周囲温度・冷却条件など)のもとで、熱的に許容される範囲内で連続運転可能な出力を指します。一方、最大出力は短時間のみ発揮可能なピーク値であり、熱的制限や電気的制限により継続はできません。製品設計では定格出力を基準に選定し、安全マージンを確保します。定格を超える連続運転は発熱や故障の原因となるため注意が必要です。
余裕を持った出力設定を行うことで、信頼性と寿命を保ち、メンテナンス頻度も低減できます。
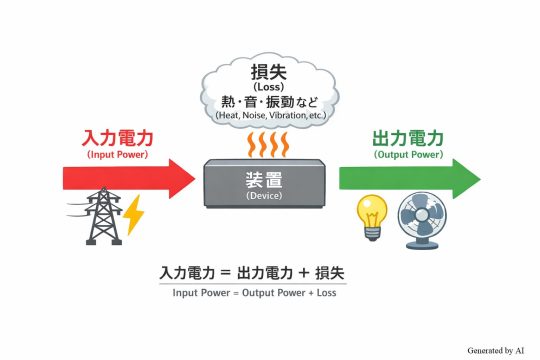
消費電力(入力)と出力の関係
消費電力(入力)は電源から供給される電力の総量で、出力は実際に機械仕事に変換された電力です。両者の比が効率であり、効率が高いモータほど少ない消費電力で大きな出力を得られます。
| 項目 | 説明 |
| 消費電力(入力) | 電源から供給される電力の総量 |
| 出力 | 機械仕事に変換された電力 |
| 効率 | 出力 ÷ 消費電力 × 100(%) |
省エネや電池駆動機器では高効率モータの選定が必須です。タキロンシーアイのコアレスモータは鉄芯を持たない構造により鉄損が少なく、高効率な点が特長です。
モータ出力の計算方法(トルクと回転数から算出する実践手順)
モータ出力はトルクと回転数の積から計算でき、設計段階で必要な出力を逆算することが可能です。計算式を理解すれば、負荷条件に最適なモータ選定が可能になります。
このセクションで解説する内容
- 出力計算の基本式と導出過程
- 実践例:負荷トルクから必要出力を求める
- 効率と損失を考慮した実用計算
以下、実際の設計に活用できる計算手順をステップバイステップで解説します。
出力計算の基本式と導出過程
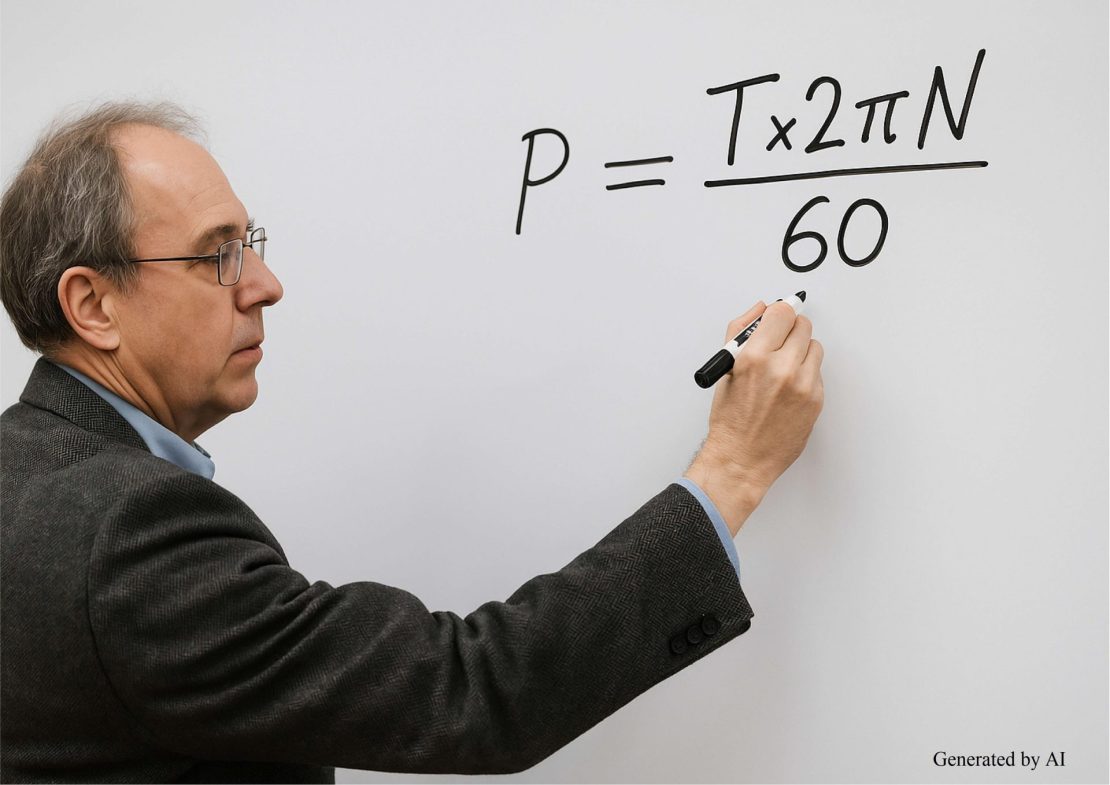
出力(W)の基本式は「P = T × ω」(トルクT × 角速度ω)で表されます。角速度は「ω = 2πN / 60」(Nは回転数rpm)となるため、最終的に「P = T × 2πN / 60」の式が導かれます。この式により、必要トルクと回転数が分かれば、出力の算出が可能です。
トルクの単位には、N・m(ニュートンメートル)とmN·m(ミリニュートンメートル)があります。マイクロモータのような小型モータでは、トルクがmN·mレベル(1N・m = 1000mN・m)となる場合が多く、計算時には単位換算に注意が必要です。逆に、出力と回転数から必要トルクを逆算することもできます。設計初期段階では、この基本式をもとに概算値を求め、詳細設計で安全率を加味していく流れが一般的です。
実践例:負荷トルクから必要出力を求める
実際の設計例で説明します。今回は、小型ポンプ駆動で必要トルクが300mN・m、運転回転数が4000rpmの場合です。
【計算手順】
- ステップ1:基本式P = T × 2πN / 60に値を代入(mN·mをN·mに換算:300 mN·m = 0.3 N·m)
- ステップ2:0.3 × 2π × 4000 / 60 ≒ 125.7W
- ステップ3:一般的に安全率を考慮(ここでは1.15~1.4倍で計算)
- ステップ4:150~180W級のモータを選定
実際には、モータ効率や負荷変動を考慮した安全率を見込んだ選定が必要です。このように計算を通じて適切な出力範囲を絞り込めば、過剰スペックによるコスト増や、不足による性能不良を防げます。
効率と損失を考慮した実用計算
多くの汎用モータでは効率 70~90%程度が一般的です。非常に小型なマイクロモータなどでは 50~60%台となる場合もあり、機械的損失を考慮する必要があります。
必要出力が100Wで効率80%の場合、入力は100W / 0.8 = 125Wです。高効率モータを選ぶことで消費電力を抑え、発熱も低減できます。また、効率を含めた実用計算により、より現実的なモータ選定が可能となります。
実際のニーズに基づいた適切なモータ選定のポイント

モータ選定は出力計算だけでなく、用途・環境・負荷特性など多角的な視点が必要です。業界ごとに求められる性能が異なるため、実際のニーズを踏まえた選定が成功の鍵となります。
このセクションで解説する内容
- 用途別の選定ポイント(医療・産業・光学機器)
- タキロンシーアイのマイクロモータによる最適解
以下、実践的な選定ポイントを業界別の要求仕様とともに解説します。
用途別の選定ポイント(医療・産業・光学機器)
医療機器では低振動・静音性と高精度制御が重視され、コギングレスのコアレスモータが有利です。内視鏡やポンプなど患者に直接関わる機器では、滑らかな動作が必須となります。
産業機器では耐久性と高トルクが求められ、小型でも十分な出力を持つモータが必要です。電動工具やハンディ機器では、携帯性と性能の両立が課題です。光学機器では高速応答と位置決め精度が重要で、低慣性・高効率なコアレスモータが適しています。カメラのオートフォーカスや顕微鏡のレンズ駆動では、微細な制御が画質を左右するため、精度の高いモータ選定が不可欠です。
各業界の要求仕様を理解し、最適なモータタイプを選ぶことが必要です。
タキロンシーアイのマイクロモータによる最適解
タキロンシーアイのコアレスモータは、鉄芯を持たない構造により、小型・軽量でありながら高効率・低振動を実現しています。医療機器の精密制御、産業機器の省スペース化、光学機器の高速応答など、多様な用途に対応可能です。
【タキロンシーアイのコアレスモータの特長】
- コギングレスによる滑らかな回転
- 高速応答性と精密な位置決め
- 低電圧起動と高効率設計
- 小型・軽量で省スペース
- 長寿命・高信頼性
カスタマイズや小ロット対応も柔軟に行っており、お客様の設計段階から技術サポートいたします。
まとめ

モータ出力は、トルクと回転数から計算でき、製品設計における基本的な選定基準です。本記事では、出力の基本概念と単位、実践的な計算方法、そして実際のニーズに基づいた選定ポイントを解説しました。
適切な出力計算と用途に応じたモータタイプを選択することで、機器の性能向上と信頼性確保が可能です。医療機器では低振動と高精度制御、産業機器では耐久性と高トルク、光学機器では高速応答が求められます。
タキロンシーアイは、これらの多様な要求に応える高性能マイクロモータを提供し、設計段階からの技術サポートで貴社の製品開発を支援いたします。
製品情報・お問い合わせ
タキロンシーアイのマイクロモータ製品については、以下のウェブサイトで詳細をご覧いただけます。
- 製品サイト:https://cik-ele.com/
- コアレスモータ:https://cik-ele.com/products/list/coreless_motor/
- ブラシレスモータ:https://cik-ele.com/products/list/brushless_motor/
- ギアードモータ:https://cik-ele.com/products/list/gearhead/
- エンコーダ:https://cik-ele.com/products/list/encoder/
お客様の製品開発における小型モータ選定でお困りの際は、お問い合わせフォームからお気軽にご相談ください。技術担当者が用途や要件をヒアリングし、最適なソリューションをご提案いたします。
- お問い合わせ:https://cik-ele.com/contact/





